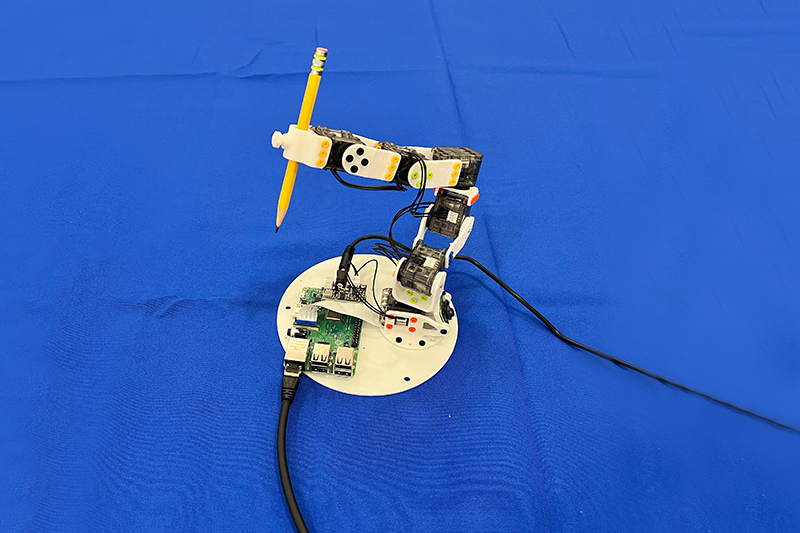
A vision-based control system called Neural Jacobian Fields enables soft and rigid robots to learn self-supervised motion control using only a monocular camera. The system, developed by MIT CSAIL researchers, combines 3D scene reconstruction with embodied representation and closed-loop control.